My research investigates the form, function, and control of tendon-driven upper-limb prosthetic devices. Across my work, I use biologically informed design, sensory feedback, musculoskeletal-informed control, and multimodal cognitive workload assessment to improve prosthesis performance and usability during activities of daily living.
TAMP Platform Overview
The Tendon-Actuated Modular Prosthesis (TAMP) is a configurable research platform developed to investigate biologically informed prosthetic design, sensory feedback, control, and evaluation.
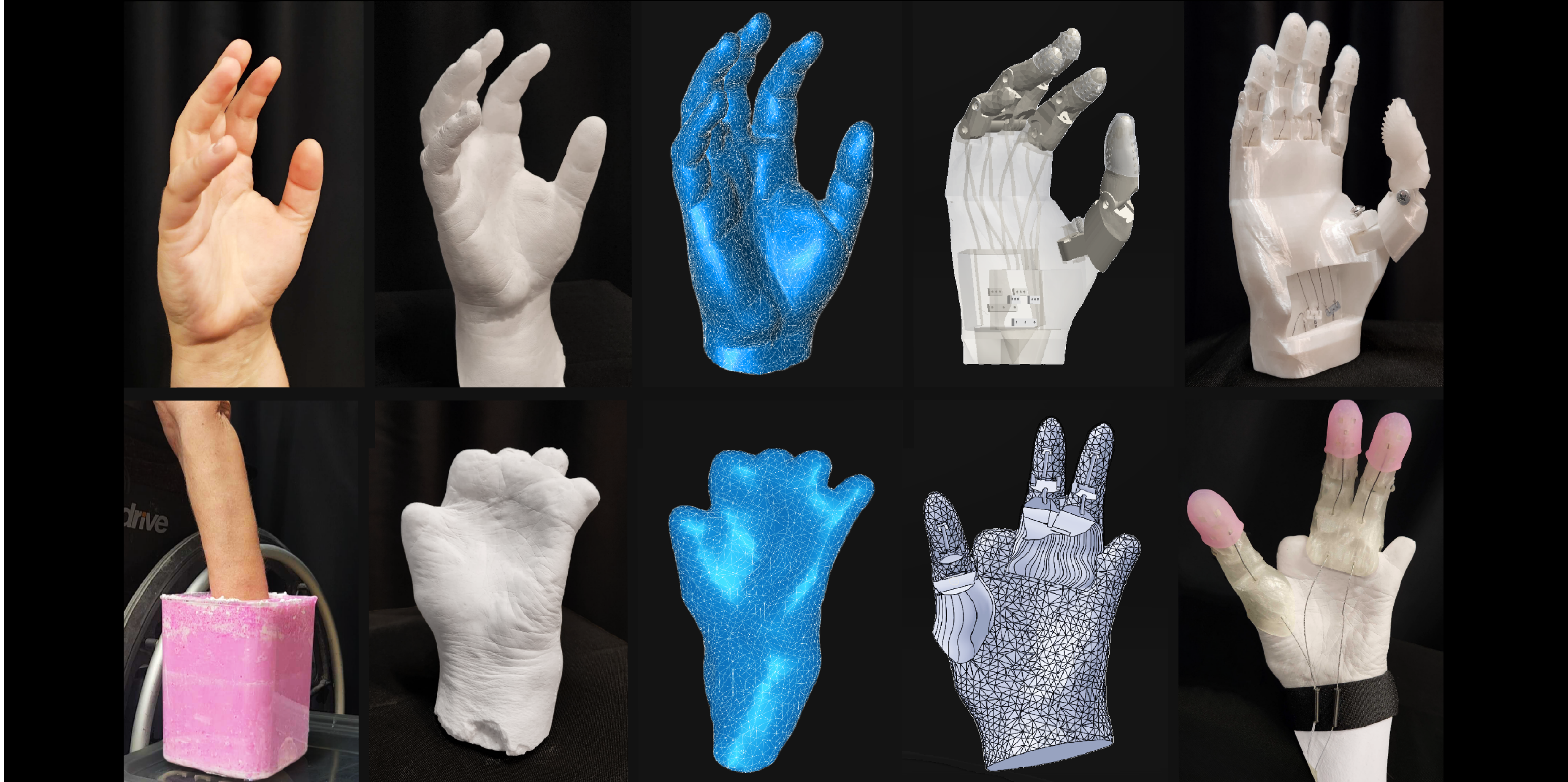
FORM
Biologically informed prosthetic hand design. This work compares anatomically informed and baseline tendon-actuated hand designs to evaluate how prosthesis geometry and tendon architecture affect ADL task performance.
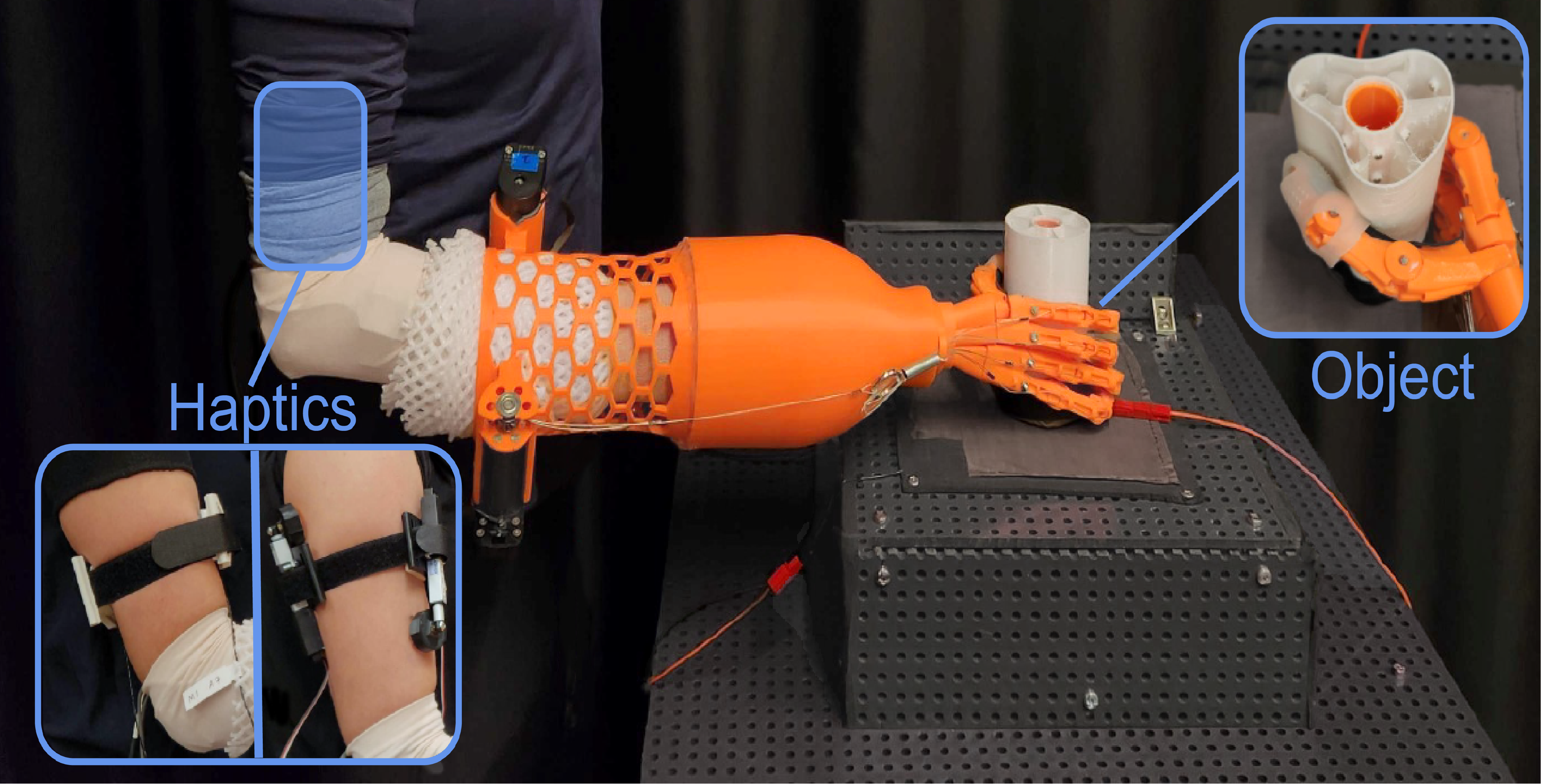
HAPTICS
State-based haptic feedback for tendon-driven prostheses. This work evaluates vibrotactile and skin-stretch feedback as strategies for communicating internal device state and reducing cognitive demand during prosthesis use.
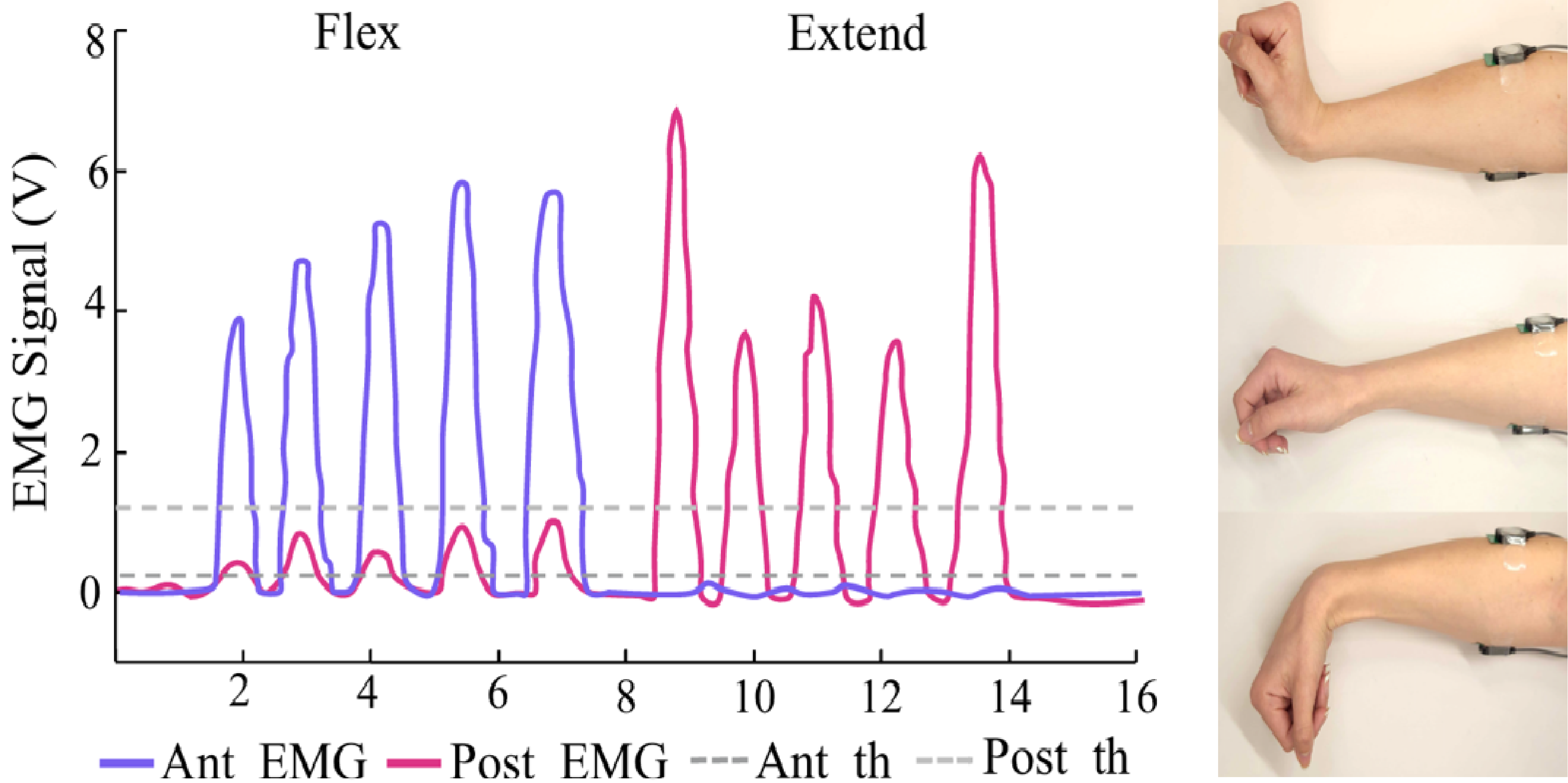
CONTROL
Musculoskeletal-informed prosthetic control. This work explores Hill-type muscle model control strategies that translate user intent into more physiologically grounded tendon-driven device behavior.
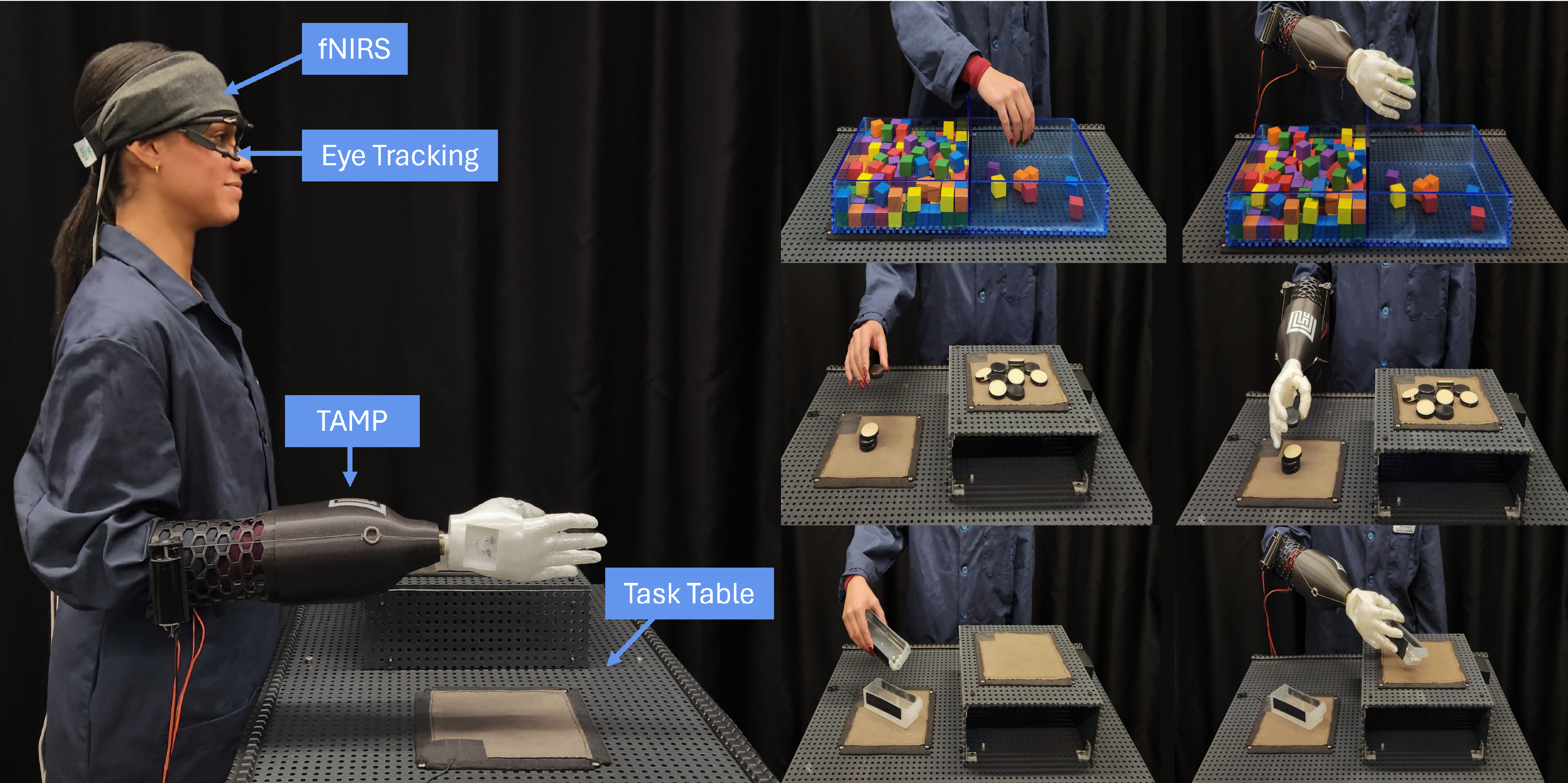
COGNITIVE EVALUATION
Multimodal cognitive workload assessment. This work combines NASA-TLX, fNIRS, eye tracking, and task performance to evaluate how prosthesis use affects cognitive workload during activities of daily living.